股票代码: 603933
 400-0898-188
400-0898-188
 集团子公司
400-0898-188
集团子公司
集团子公司
400-0898-188
集团子公司
切换产品
产品概览
规格参数
资料下载


| ① | 产品系列 | RS3D:伺服双轴驱动器 |
| ② | 控制方式 | P:脉冲 |
| E:EtherCAT | ||
| ③ | 轴数 | D:双轴 |
| ⑤/⑥ | 1轴/2轴功率 | 04:400w |
| 07:750w | ||
| 10:1000w | ||
| ⑦ | 输入电压 | L:单相220V |
| ⑧ | 刹车电阻 | B:内置刹车电阻 |
| ⑨ | 功能和应用 | 2:带显示按键,各轴带工作/故障指示灯 |
| ⑩ | STO(选配) | 空:无STO |
| S:STO |
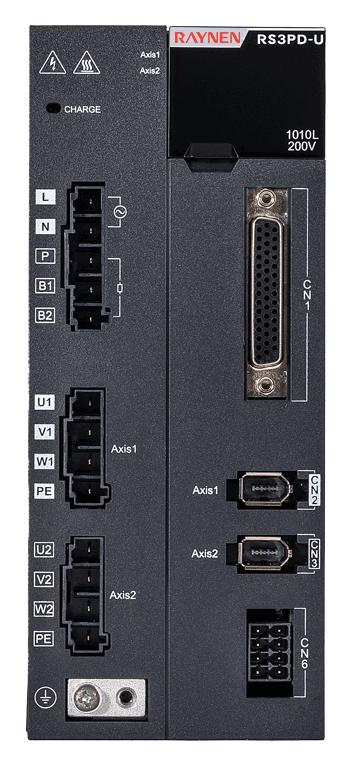
RS3D双轴驱动器与MC2Y系列伺服电机配置示例
| 双轴驱动器 | 适配电机法兰 | 适配电机型号 | 额定扭矩 | 额定功率 | 额定/最高转速 | 动力线 | 编码器线 |
|---|---|---|---|---|---|---|---|
| RS3PD-U0404L-2 | 60mm | MC2H-M06040F-E1B2Y | 1.27N·m | 400w+400w | 3000(6000) | LM-OMICN-XXX | LE-1MBBN-XXX |
| MC2H-M06040F-A1B2Y | |||||||
| RS3PD-U0707L-B2 | 80mm | MC2H-M08075F-E1B2Y | 2.39N·m | 750w+750w | 3000(6000) | ||
| MC2H-M08075F-E1B2Y | |||||||
| RS3PD-U1010L-B2 | 80mm | MC2H-M08100F-A1B2Y | 3.18N·m | 1000w+1000w | 3000(6000) | ||
| MC2H-M08100F-E1B2Y |
■ RS3D 基本规格:
| 项目 | 规格 | ||
|---|---|---|---|
| 基本规格 | 控制方式 | IGBT PWM 控制 正弦波电流驱动方式 | |
| 编码器类型 | 通讯型编码器(RS485) | ||
| 通信功能 | USB | Type-C PC 上位机通讯用 | |
| RS485 | Modbus 上位控制器控制通讯用 | ||
| CAN | CAN 上位控制器控制通讯用 | ||
| 动态制动 | 主回路电源off,伺服报警,伺服off,超程时动作 | ||
| 再生制动 | 除 Size A(1R6/2R8)机型外,其他机型内置 | ||
| 保护功能 | 过压、欠压、缺相、过流、过载、超速、编码器异常、散热器过热、其他 | ||
| 辅助功能 | 增益调整、陷波器、报警记录查询、JOG运行、电机初始角辨识、其他 | ||
| 控制信号数量 | DI 4个,HDI 4个,DO 6个 | ||
| 位置控制 | DI 输入功能 | 零位固定使能、位置指令禁止、正向超程开关、反向超程开关、电子齿轮比选择、位置指令方向设定、多段位置指令使能、中断定长状态解除、原点开关、原点复位使能、中断定长禁止、清除位置偏差、脉冲指令禁止 | |
| DO 输出功能 | 定位完成、定位接近、中断定长完成、原点回零完成 | ||
| 脉冲输入 | 输入脉冲形态 | 差分输入、集电极开路 | |
| 输入脉冲方式 | “方向+脉冲”、“CW/CCW”、“A、B相正交脉冲” | ||
| 最大脉冲频率 | 差分输入:高速最大 4Mpps,脉宽不能低于 0.125us | ||
| 集电极开路:最大 200kpps,脉宽不能低于 2.5us | |||
| 指令滤波器 | 平均值滤波、一阶低通滤波 | ||
| 分频输出 | 分频输出范围 | 任意分频比 | |
| 分频输出形态 | A相/B相:差分输出 | ||
| Z相:差分输出或集电极开路输出 | |||
| 分频输出来源 | 编码器位置或指令脉冲 | ||
| 内部位置指令 | 通过DI 切换内部规划的最大16 段的位置指令 | ||
| 速度控制 | DI 输入功能 | 多段速运行方向切换、内部多段速度选择(1-4)、速度指令方向设定、内部速度限制源 | |
| DO 输出功能 | 零速钳位、电机旋转、零速信号、速度一致、速度受限、速度到达 | ||
| 模拟量输入 | 指令电压 | 0 ~ ±10V DC | |
| 指令滤波器 | 平均值滤波、一阶低通滤波 | ||
| 内部速度指令 | 通过DI切换内部规划的最多16段速度指令 | ||
| 转矩控制 | DI 输入功能 | 正转转矩限制、反转转矩限制、转矩指令方向设定、速度限制选择 | |
| DO 输出功能 | |||
转矩限制、转矩到达 | |||
| 模拟量输入 | 指令电压 | 0 ~ ±10V DC |
 400-0898-188
400-0898-188
137-6468-5533





关注睿能

关注睿能智控







 首页
首页